Coarse Sun Sensor: A Guide to CSS Design, Function, and Applications in ADCS
Authored by Afan Huang
In satellite attitude determination and control systems (ADCS), knowing where the Sun is provides a fundamental reference for spacecraft orientation. Coarse sun sensors (CSS) serve as practical backup sensors and initial acquisition tools, offering basic sun direction information through simple, robust designs.
This guide explores the design principles, operational characteristics, and practical applications of coarse sun sensors in modern spacecraft. We'll examine how these sensors function as part of a broader ADCS architecture, their role in backup and safe mode operations, and what distinguishes them from precision sensors like fine sun sensors and star trackers.
What is a Coarse Sun Sensor?
A coarse sun sensor (CSS) is a basic optical attitude sensor designed to detect the direction of sunlight relative to a spacecraft's body frame. CSS devices prioritize simplicity, robustness, and wide field-of-view coverage over precision, making them suitable for non-critical pointing applications and backup operations.
Role in ADCS Systems
In an ADCS architecture, coarse sun sensors typically serve as secondary or backup sensors rather than primary attitude references:
1. Initial Attitude Acquisition
After deployment from a launch vehicle, satellites often tumble randomly through space. CSS provides the first rough indication of the Sun's direction, enabling the spacecraft to stabilize and orient itself toward a power-positive attitude. Once initial acquisition is complete, the spacecraft typically transitions to more precise sensors for normal operations.
2. Safe Mode Operations
When primary attitude sensors (star trackers, fine sun sensors) fail or the spacecraft experiences an anomaly, CSS serves as a reliable backup. Their simple design and minimal power consumption make them appropriate for safe mode configurations, where the goal is to maintain solar panel illumination rather than precision pointing.
3. Coarse Attitude Determination
Combined with magnetometers or gyroscopes, CSS can provide three-axis attitude determination with accuracy typically ranging from ±3° to ±10°. This accuracy is insufficient for most science missions, high-resolution imaging, or precision communication applications, but adequate for basic solar array pointing and spacecraft survival operations.
〈Related Reading:Attitude Determination and Control Systems (ADCS): An In-Depth Analysis from Sensing to Control〉
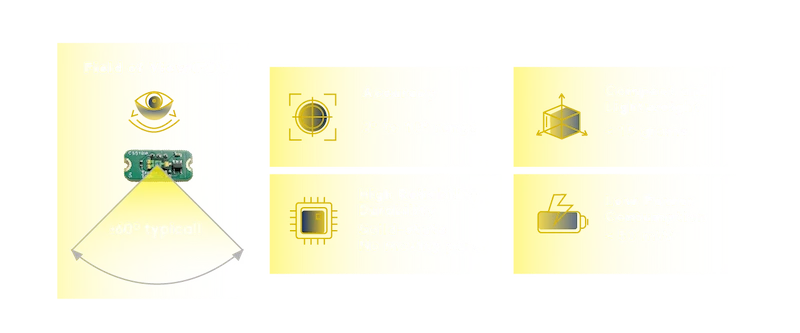
Operating Principle
Most coarse sun sensors operate on the cosine law principle. A photodiode or photoresistor mounted on the spacecraft surface generates an output current (or voltage) proportional to the cosine of the angle between the sensor's boresight (normal direction) and the incident sunlight:
I_out = K × cos(φ)
Where:
-
I_out = Output current from the photodiode
-
K = Peak current when the Sun is directly along the sensor boresight (φ = 0°)
-
φ = Angle between the sensor's boresight and the Sun vector
This simple relationship means a single CSS cannot determine the exact direction to the Sun, and it can only tell you that the Sun lies somewhere on a cone around the sensor's boresight. To resolve the Sun's position in three-dimensional space, you need measurements from at least three non-coplanar CSS units that all have the Sun within their field of view.
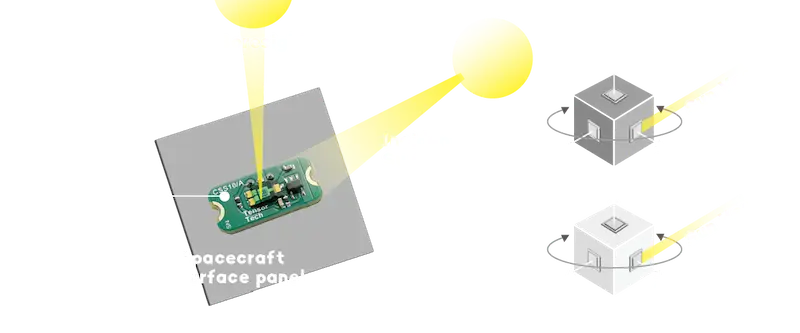
Coarse Sun Sensor Operating Principle
Limitations: The cosine response becomes unreliable at steep angles (>60°), and CSS measurements are affected by Earth albedo (reflected sunlight), thermal variations, and radiation degradation over mission lifetime.
Multiple CSS Configurations for Full Coverage
Since individual coarse sun sensors have a limited field of view (typically ±60°), spacecraft require multiple CSS units strategically positioned to ensure the sun detection from any orientation. Modern satellite design leverages CSS affordability by deploying sensors in distributed arrays.
Distributed Multi-Sensor Arrays
The standard approach in contemporary spacecraft design is to mount individual CSS units across multiple faces of the satellite structure. Common configurations include:
-
6-sensor configuration:
One CSS on each face of a cubic satellite (±X, ±Y, ±Z axes), providing complete 4π steradian coverage
-
8-12 sensor configurations:
Additional sensors at edges or corners for improved accuracy and redundancy
-
Custom arrays:
Sensors positioned to avoid obstructions from antennas, solar panels, or other hardware
This distributed approach has become dominant because CSS units are cost-effective ($500-2,000 each), allowing missions to deploy multiple sensors without significant cost impact while gaining substantial benefits in coverage and fault tolerance.
Benefits of Trade-offs of Multi-Sensor Arrays
-
Redundancy and Fault Tolerance
Multiple independent sensors mean that failures don't cause complete loss of sun-sensing capability. If 1-2 sensors fail due to radiation damage or other causes, the remaining sensors continue to provide sufficient coverage. However, this redundancy is typically considered a backup to more capable primary sensors rather than the main attitude determination approach.
-
Moderate Accuracy Improvement
When more than the three sensors detect the Sun simultaneously, algorithms can combine measurements to reduce individual sensor noise. However, the fundamental accuracy limitations of CSS remain, and missions requiring better performance must use fine sun sensors or star trackers.
-
Cost-Effective Scalability
Because individual CSS units are simple and affordable, adding extra sensors for improved performance is economically feasible even for budget-constrained CubeSat missions. This "deploy more simple sensors" strategy often proves more cost-effective than investing in a single complex, high-precision sensor.
Performance and Primary Applications of Coarse Sun Sensors
Coarse Sun Sensor Performance
Performance Specifications
Typical coarse sun sensor performance characteristics include:
| Parameter | Typical Value | Notes |
|---|---|---|
| Accuracy | ±3° to ±10° (1-σ) | Varies with incident angle; best at 10-50°; insufficient for precision missions |
| Field of View | ±60° typically | Per sensor; distributed configs provide full-sphere coverage |
| Update Rate | 1-100 Hz | Analog types limited by ADC |
| Power Consumption | <50 mW per sensor | Low power suitable for safe mode |
| Mass | <15 grams per unit | Lightweight |
| Temperature Range | -40°C to +100°C | Wide operational range |
| Radiation Tolerance | >24 krad (Si) | Typical for space-qualified designs |
Primary Applications
Initial Sun Acquisition
After launch vehicle separation, CSS provides the first attitude reference, enabling the spacecraft to:
Limitation: Once stabilized, most missions switch to fine sun sensors or star trackers for operational pointing.
〈Related Reading:Magnetorquer Functions, Configurations, and Applications in Satellite Missions〉
-
Stop tumbling by activating magnetic torquers or thrusters
-
Orient solar panels toward the Sun for initial power generation
-
Establish a power-positive attitude for subsequent operations
Solar Array Pointing
For spacecraft with basic power requirements and deployable solar arrays, CSS provides adequate accuracy for:
Limitation: High-power missions or single-axis gimbaled arrays typically require fine sun sensors for optimal efficiency.
-
Maximizing solar power generation on missions without strict pointing requirements
-
Coarse tracking of the Sun’s position relative to the orbit
Safe Mode and Fault Recovery
When primary attitude sensors fail or the ADCS computer resets, CSS serves as a backup:
-
Maintains basic Sun-pointing to preserve power
-
Provides coarse attitude data for ground communication
-
Enables gradual recovery while troubleshooting primary systems
Auxiliary Attitude Determination
CSS can supplement other sensors:
Limitation: CSS cannot provide the precision needed for most operational tasks; it serves primarily as a backup reference.
-
With magnetometers: Provides two independent vector measurements for basic three-axis attitude determination
-
With gyroscopes: Serves as an absolute reference to detect gyro drift
-
As validation: Sanity-checks star tracker or FSS solutions to detect failures
Low-Budget Missions with Relaxed Requirements
For technology demonstration CubeSats, educational satellites, or missions without pointing requirements, CSS may be the only sun sensor needed.
Limitation: This represents a minority of missions; most operational satellites require better accuracy.
When CSS is NOT Sufficient
CSS should not be the primary sensor for:
-
Science missions requiring precise instrument pointing
-
Earth observation satellites needing accurate ground track registration
-
Communication satellites requiring narrow-beam antenna pointing
-
Formation flying missions needing relative position knowledge
-
Docking operations or proximity operations
-
Any mission requiring <1° pointing accuracy
For these applications, fine sun sensors, star trackers, or GPS-based attitude systems are necessary.
Coarse Sun Sensor vs. Fine Sun Sensor
Understanding when to use CSS versus FSS requires recognizing their different design goals and appropriate applications.
Similarities
Both CSS and FSS:
-
Detect sunlight using photodiodes or photodetector arrays
-
Provide Sun vector measurements in the spacecraft body frame
-
Are passive sensors with no moving parts
-
Work only when the Sun is visible (eclipse periods require other sensors)
Key Differences
Design Philosophy
-
CSS: Maximizes simplicity. A single photodiode with minimal electronics produces an analog signal proportional to incident sunlight intensity.
-
FSS: Prioritizes precision through sophisticated optical designs. Uses aperture masks, quadrant photodiodes, or CMOS imagers to measure the Sun's position relative to the sensor's reference frame.
Measurement Output
-
CSS: Provides only the α angle—one axis of information. Multiple CSS units are required to triangulate the full Sun vector and accuracy remains limited.
-
FSS: Outputs both α (azimuth) and β (elevation) angles, directly providing a two-axis Sun vector measurement from a single sensor.
Operating Principle
-
CSS: Relies on the cosine response of a photodiode to incoming light intensity.
-
FSS: Uses positional sensing—an aperture creates a sunlight spot on a detector array, and the spot's location determines the Sun's incident angle.
Comparison Table
| Characteristic | Coarse Sun Sensor (CSS) | Fine Sun Sensor (FSS) |
|---|---|---|
| Accuracy | ±3° to ±10° (1-σ) | ±0.1° to ±1° (1-σ) |
| Measurement Axes | 1-axis (requires 3+ for full vector) | 2-axis (single sensor provides full vector within FOV) |
| Sensing Principle | Cosine response (intensity measurement) | Positional sensing (aperture + detector array) |
| Complexity | simple (single photodiode + electronics) | moderate (optical aperture, mask, multi-element detector, digital processing) |
| Primary Applications | Backup, safe mode, initial acquisition | Primary attitude sensor for operational missions |
| Data Output | Analog voltage or digital (after ADC) | Digital (RS485, UART, I2C) with embedded processing |
〈Related Reading:An introduction to fine sun sensors〉
When to Choose Which?
Use CSS when:
-
Budgets are tightly constrained (CubeSats, nanosatellites)
-
Pointing accuracy requirements are relaxed (>3°)
-
Simplicity
Use FSS when:
-
Pointing accuracy is required (<1°)
-
Easier integration and reduced software development are priorities
-
The mission can afford moderate sensor cost.
-
A primary sensor is required more than just a backup sensor.
Use both (hybrid approach) when:
-
FSS serves as the primary operational sensor.
-
CSS provides backup capability for safe mode and fault scenarios.
Most operational satellites use FSS or star tracker as primary sensors, with CSS serving backup roles. Pure CSS-based attitude determination is only applied in some educational CubeSats, technology demonstrations, or extremely low-budget missions.
〈Related Reading:How to pick up a suitable CubeSat ADCS〉
Tensor Tech's Coarse Sun Sensor Solutions
Tensor Tech offers sun sensor solutions for satellite attitude determination, with options ranging from basic analog sensors to precision digital systems.
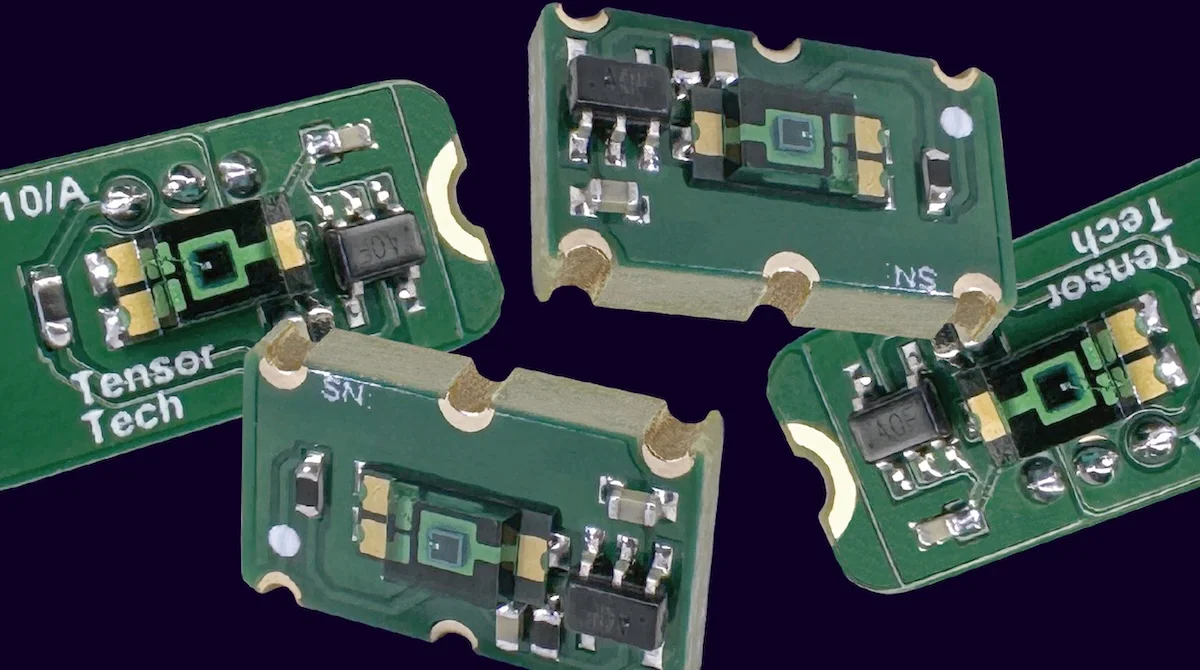
TensorCSS-10
TensorCSS-10 Coarse Sun Sensor
Overview
The CSS-10 is an analog coarse sun sensor designed for spacecraft requiring basic sun detection capability. With a ±60° field of view per sensor, six units can provide full-sphere coverage when distributed across spacecraft faces.
Key Specifications:
-
Sun determination accuracy: <5° (1-σ) with proper calibration
-
Operating temperature: -40°C to +100°C
-
Analog output: 0-2.4V
Integration Requirement
The TensorCSS-10 outputs analog output signals (0-2.4V) requiring external analog-to-digital converters (ADC) for each sensor.
TensorFSS-15M Fine Sun Sensor (Recommended)
For most missions requiring reliable sun sensing, Tensor Tech recommends the TensorFSS-15M, which offers significant advantages in accuracy, integration, and ease of use.
Key Advantages
-
High precision: 0.1° (1-σ) accuracy
-
Digital output: RS485/UART interface with embedded processing
-
Factory calibrated: Pre-loaded error correction tables
-
Direct integration: Compatible with standard ADCS computers
-
Reduced development time: No custom algorithm development required
-
Optional magnetometer: Dual-mode attitude sensing capability
Complete ADCS Solutions
For turnkey attitude control, Tensor Tech also offers the TensorADCS-10m, a fully integrated system combining CMGs, sensors, and control electronics in a compact package.
Conclusion
Coarse sun sensors serve a specific role in satellite ADCS as backup sensors and initial acquisition tools. The accuracy of CSS is insufficient for operational missions, which typically require fine sun sensors or star trackers as primary attitude references.
For operational satellites, modern ADCS design employs CSS as secondary sensors while relying on precision instruments for mission-critical pointing. The value of CSS lies in its simplicity as a fallback system, not as a primary attitude solution.
Ready to enhance your satellite's ADCS capabilities?
Visit Us or contact their engineering team to discuss your mission requirements and find the optimal sun sensor solution for your spacecraft.