CMG SERIES
CMG for SmallSats
The TensorCMG Series features variable-speed, single-gimbal CMGs driven by spherical motor technology, available in single and clustered configurations for satellites from 30 kg to 1000 kg.
This spherical motor design reduces weight, volume, and power consumption (SWaP).
An autonomous torque calculation algorithm is integrated on the control board, enabling multi-axis torque output through simple commands.

Features
Torque-to-power ratio optimization
Form factor: fits tuna-can standard
Soft error and hard error fault detection
Jitter (micro-vibration): ISO1940 G0.4 @ 8000rpm
Magnetic leakage flux shielded with Ni-iron alloy
A spinning rotor is maintained at variable speed through spherical motor actuation. The rotor is mounted in a gimbal frame, allowing the spin axis to tilt.
When the gimbal tilts the rotor's spin axis, the spacecraft experiences torque due to conservation of angular momentum, inducing rotation of the spacecraft.
Satellite
CONFIQURATION

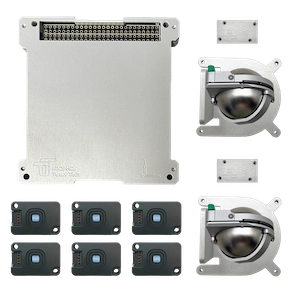
CMG-1 x 2 (Adjacent Pair)
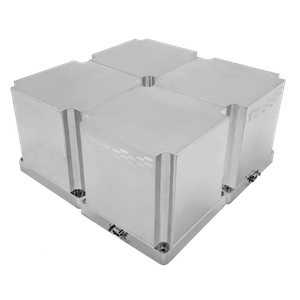
CMG-1 x 4 (Pyramid Cluster)

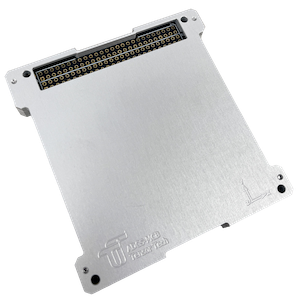
CMG-1

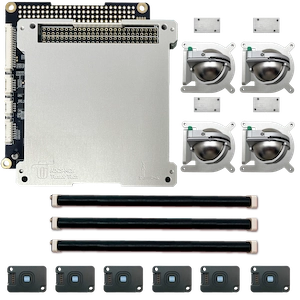
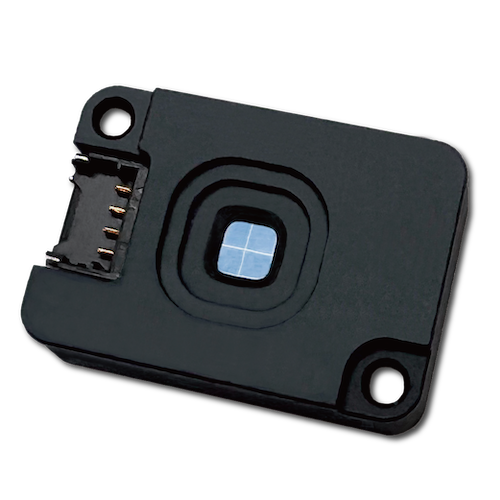
CMG-4
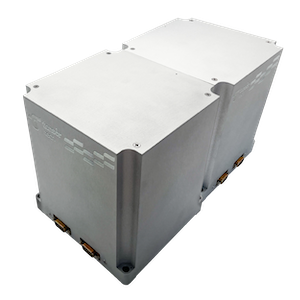
CMG-4 x 2 (Adjacent Pair)

CMG-4 x 4 (Pyramid Cluster)
Product
SPECIFICATIONS
- Momentum
1 Nms
- Torque
> 3 Nm
- Gimbal axis angular range
Unlimited
- Gimbal Maneuver
> 30 million
- Dimensions
100 x 100 x 120 mm3
- Mass
< 2.5 kg
- Rotor Imbalance
ISO 1940. G0.4
- Supplied DC bus Voltage
22 ~ 34 V
- Communication Interface
RS-422
- Radiation Hardness
> 24 krad(Si) on electronics
PRINCIPLES BEHIND
GYROSCOPIC TORQUE
The rotor is enclosed within a gimbal, depicted as the golden component in the illustration.
This gimbal facilitates the rotor's spin axis (Gs) to be tilted in various orientations.
When the gimbal rotates in the Gg direction, it generates gyroscopic moments (Gt) due to the change in angular momentum caused by tilting the rotor's axis.
This gyro moment in Gt direction, acting perpendicular to the angular velocity vector, requires significantly less mechanical power compared to reaction-wheel-torque.
OTHER
PRODUCTS
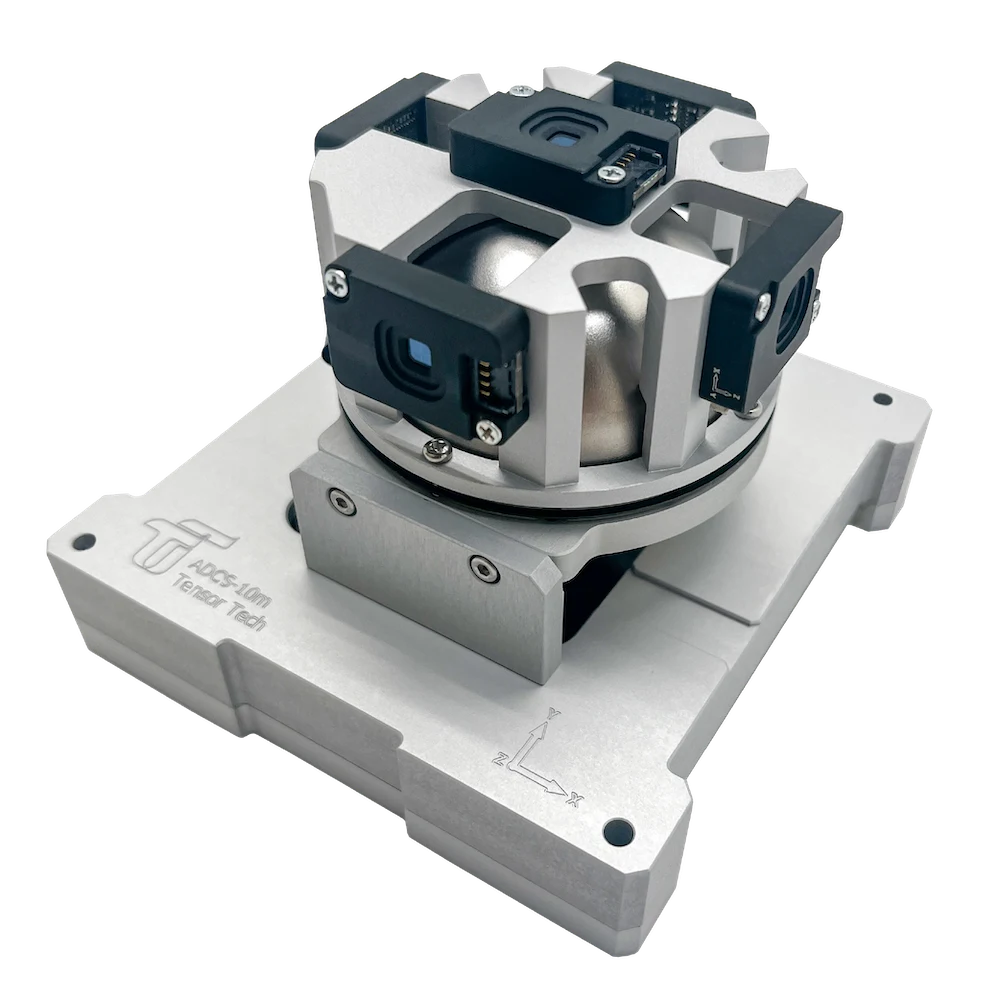
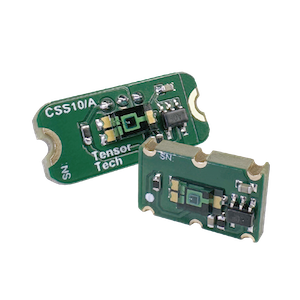
ADCS-10m
TensorADCS-10m is an integrated ADCS with a variable speed control moment gyroscope (CMG) which is suitable for satellites up to roughly 3U. This module can be installed within the tuna can or the satellite structure.