Spacecraft Bus Selection in the Age of Agile Missions: What the Market Data Tells Us About ADCS
Authored by A. Huang
Spacecraft bus selection shapes every subsystem decision that follows, yet attitude control requirements are not always defined early enough to inform that choice.
In practice, bus selection tends to precede the quantification of pointing accuracy and slew rate requirements, which define the performance of the attitude determination and control system (ADCS). By the time those requirements are fully understood, the bus class has already set boundaries that are difficult and costly to revisit.
This sequencing issue appears consistently in mission planning, but the market conditions that make it consequential have shifted. Earth observation and remote sensing now account for a growing share of SmallSat deployments, and average spacecraft mass has been rising steadily since 2021. These missions place higher demands on pointing accuracy and slew rate than the broadband constellations that have dominated launch counts over the past five years. As the market shifts toward agile missions that depend on precise pointing and rapid retargeting, the later a mismatch between bus class capability and mission requirements is identified, the harder it is to resolve.
What the Launch Data Shows About Where the Market Is Heading
In 2024, 2,790 SmallSats were launched globally, accounting for 97% of all spacecraft launched that year. BryceTech defines SmallSats as spacecraft with a mass of 1,200 kg or under, encompassing nanosatellites, microsatellites, and larger platforms up to that threshold. Starlink and OneWeb together made up 73% of that total. The remaining 786 spacecraft came from 220 other operators across commercial, government, and academic sectors, and it is this segment that is more relevant for bus selection decisions.
Spacecraft Mass Is Shifting Upward
Among non-broadband operators, the data from BryceTech shows a consistent shift toward heavier spacecraft. Excluding Starlink and OneWeb, average SmallSat mass reached 223 kg in 2024, compared to 87 kg in 2021. In the same year, the mini class (201–600 kg) and small class (601–1,200 kg) both saw approximately 10 percentage points of share growth among non-broadband launches. BryceTech's summary of this trend is stated plainly in the report: "smallsats are getting larger." Figure 1 illustrates this upward shift in average spacecraft mass among non-broadband operators.
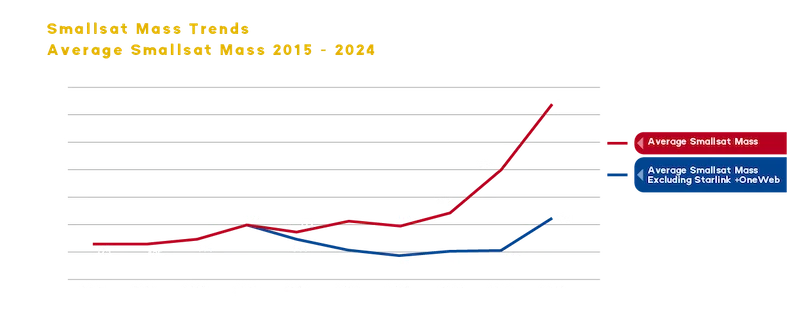
Figure 1. Average Mass of Smallsats (Excluding Starlink/OneWeb)
Source : https://brycetech.com/reports/report-documents/smallsats-2025/BryceTech_Smallsats-by-the-Numbers-2025.pdf
Heavier spacecraft occupy higher bus classes. The physical consequences of that shift for ADCS design are covered in the next section.
Remote Sensing Missions Are Driving Demand
Remote sensing has been the largest application category among non-broadband SmallSats every year since 2016. Figure 2 shows the distribution of SmallSat missions by application, with remote sensing consistently representing the largest share. Its share reached 47% of non-broadband launches in 2024, up from 39% in 2015. The growth has been steady rather than sudden, and 2023 and 2024 both recorded year-on-year increases.
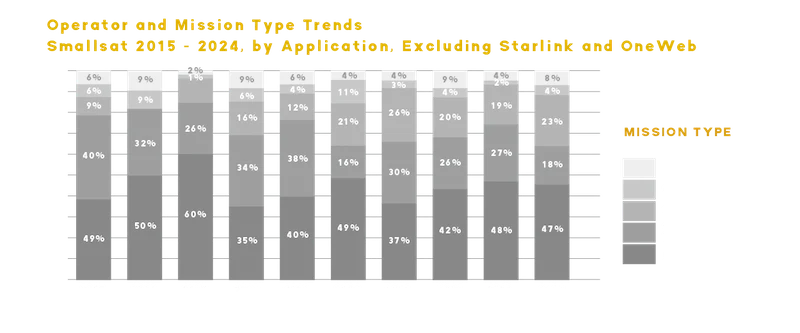
Figure 2. Smallsat Missions by Application
Source : https://brycetech.com/reports/report-documents/smallsats-2025/BryceTech_Smallsats-by-the-Numbers-2025.pdf
Remote sensing missions place higher demands on pointing accuracy and slew rate than most other SmallSat applications. A commercial Earth observation satellite and a broadband communications satellite can occupy the same bus class and carry pointing requirements that differ by an order of magnitude. As remote sensing grows as a share of the market, a larger proportion of missions in planning today carry ADCS requirements that the bus selection decision will need to accommodate.
The Nanosats Database recorded 390 nanosatellite launches in 2023, a new annual record, and the cumulative total of launched CubeSats surpassed 2,000 in early 2023. It took close to 16 years to reach the first thousand, and less than four years to reach the second. The pace of deployment has accelerated, but the trajectory is not uniform. Figure 3 illustrates the acceleration in CubeSat deployment over time.
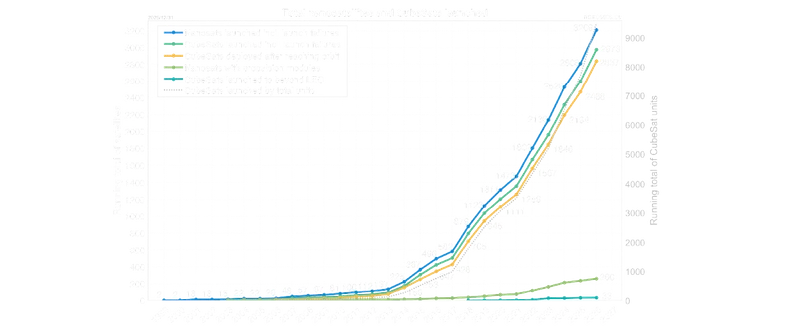
Figure 3. Total Nanosatellites and CubeSats Launched (Source : nanosats.eu)
This is consistent with a broader pattern that the same database documents: most commercial constellations are moving toward larger satellites, while nanosatellite deployments continue at scale for technology demonstration, scientific research, and sensing applications. The market is not shifting in a single direction. Form factors are getting both larger and smaller simultaneously, with demand at both ends of the size spectrum. What is changing is the composition of the heavier end, where missions with more demanding operational requirements are becoming a larger share of total deployments, and where bus class selection carries more design consequences.
Spacecraft Bus Size Is a Design Constraint, Not Just a Form Factor
The bus class selection is among the earliest decisions in a mission design, and it sets hard limits on power, volume, and mass before any ADCS design begins. Those limits determine which actuator and sensor configurations are physically possible.
The Three Hard Constraints
Three parameters bound the ADCS design space on any spacecraft: available power, volume envelope, and mass allocation. Satisfying one will often tighten the other two.
Power is the most binding constraint at small scales. Simulations across fifteen CubeSat configurations show that ADCS operations consume more than 15% of total generated power on spacecraft below 2U size. On a 1U CubeSat, a basic slew maneuver requires approximately 40% of total available power. At that level, reaction wheels are not a practical solution. As bus size grows, more power becomes available outside ADCS operations, and actuator options expand accordingly.
Volume determines which actuator classes fit. Wheel diameter governs angular momentum capacity, and a small spacecraft interior cannot simultaneously accommodate a multi-wheel assembly, a star tracker, and the associated electronics without trade-offs that compromise at least one subsystem. Mass and volume fraction consumed by momentum actuators rise steeply as spacecraft mass decreases.
On a nanosatellite, the ADCS mass fraction can reach 30–40% of total spacecraft mass. That is a figure that would be considered unusual on a 500 kg platform. Every gram assigned to an ADCS component is unavailable for payload or propulsion, and on a small bus that trade-off has direct mission consequences.
How Bus Class Shifts the Design Space
These constraints do not ease gradually as bus size increases. A nanosatellite designer faces a fundamentally different set of options than a microsatellite designer. The available design space changes category, not just scale.
On a nanosatellite bus (1–10 kg), power scarcity and limited volume confine practical actuator choices to magnetorquers for coarse control and small reaction wheels for three-axis stabilization. Angular momentum storage per wheel typically falls below 0.05 Nms. Pointing accuracy is bounded by what sensor hardware fits in the available space, which in most configurations means coarse sun sensors and, where budget allows, a single star tracker.
Moving to a microsatellite bus (10–100 kg) changes the situation materially. Power budgets can sustain a star tracker continuously. Volume accommodates a multi-wheel pyramid configuration (reaction wheels or control moment gyroscopes). Momentum capacity per wheel reaches 0.5–1.0 Nms. Together, they bring pointing accuracy into the 0.03–0.1° range, which is the threshold at which commercial Earth observation missions become viable.
At the small satellite level (50–500 kg), power and volume are no longer the primary constraints. The design question shifts to agility: how quickly can the spacecraft slew to a new target, and what does that cost in power. At this scale, control moment gyroscopes (CMGs) become the typical actuator choice for high-agility missions. The TensorCMG-1 delivers 1 Nms of momentum storage and over 3 Nm of torque at under 10 W, while the TensorCMG-4 scales to 4 Nms and over 10 Nm, and the TensorCMG-10 reaches 10 Nms and over 30 Nm for larger platforms in this class. These torque-per-watt figures represent a level of agility that reaction wheels cannot match at equivalent momentum levels. This difference in actuator performance is illustrated in Figure 4.
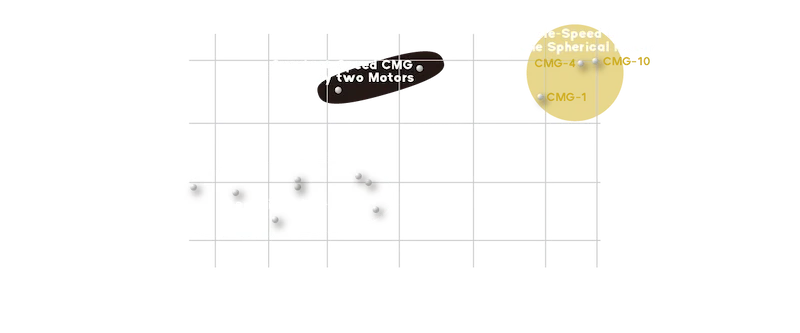
Figure 4. General Comparison of Actuator Clusters
ADCS Design Space by Bus Class
Table 1 maps the three bus classes to their typical actuator configuration and corresponding ADCS performance ranges. The typical actuator column reflects market-dominant choices for each class. Momentum capacity values come from manufacturer product specifications that explicitly identify the intended spacecraft class. Pointing accuracy values for nanosatellite and microsatellite classes are drawn from NASA's Small Spacecraft Technology State of the Art Report 2025 and optical microsatellite mission literature. For the small satellite class, pointing accuracy is mission-dependent and covered separately below.
| Bus Class | Typical Actuator | Momentum Capacity | Actuator / Momentum Source | Pointing Accuracy | Pointing Source |
|---|---|---|---|---|---|
| Nanosatellite 1–10 kg | Magnetorquer + Reaction Wheel | 0.003 – 0.05 Nms | RW222: 3–6 mNms (1–3U), RW400: 15–50 mNms (6–12U) | 0.1° – 5° | NASA SOA 2025Table 5-1, 5-2 |
| Microsatellite 10–100 kg | Multi-wheel Configuration (Reaction Wheels or CMGs) | 0.06 – 1.0 Nms | WHL-500: 500 mNms (50–100 kg), RW-1.0: 1 Nms (100 kg EO) | ~0.03° – 0.1° | Optical microsatellite literature, NASA SOA 2025 Table 5-2 |
| Small Satellite 50–500 kg | Magnetorquer*3 + CMG*4 (or Reaction Wheel Configuration) | 1 – 10 Nms(single unit) | TensorCMG-1: 1 Nms, >3 Nm, TensorCMG-4: 4 Nms, >10 Nm, TensorCMG-10: 10 Nms, >30 Nm | Mission-dependent< 0.01° (EO) to~0.1° (comm) |
Table 1. ADCS design space by spacecraft bus class. Momentum capacity values sourced from manufacturer product specifications.
〈Related Reading:Keys toward precise attitude control〉
〈Related Reading:Exploring ADCS Principles: A Technical Deep Dive into Attitude Determination and Control Systems〉
The momentum capacity numbers follow directly from spacecraft physics. Spacecraft moment of inertia scales roughly with the fifth power of linear dimension, meaning that doubling the spacecraft size increases the momentum required for the same slew maneuver by a factor of roughly thirty. The step from 0.05 Nms to 1.0 Nms between nanosatellite and microsatellite classes reflects the minimum storage needed to execute the retargeting maneuvers that commercial Earth observation missions require.
Pointing accuracy improvement between classes is not primarily an algorithm question. The determining factor is whether a star tracker can be included in the hardware configuration. Star trackers need volume, continuous power, and mass allocation. All three become routinely available at the microsatellite level. Below that threshold, most missions are working with coarser sensors and correspondingly coarser pointing performance.
The transition between bus classes is not a matter of scaling existing components. A mission moving between bus classes is not selecting larger versions of the same hardware. It is entering a design category where different actuator architectures become available, where sensor configurations that were previously excluded by volume and power constraints become standard, and where the ADCS design process begins from a different set of assumptions. Mission planners who approach this transition as an incremental upgrade risk carrying assumptions from the previous class into a design space that no longer applies them.
For the small satellite class, the table deliberately avoids a single pointing accuracy figure. At 100–500 kg, the hardware capability exists to achieve better than 0.01° pointing accuracy. Whether a mission actually requires it depends entirely on the payload. A high-resolution EO satellite and a broadband communications satellite can share the same bus class and have pointing requirements that differ by an order of magnitude. What changes at this scale is not pointing capability. It is the actuator trade-off. Research comparing reaction wheels and CMGs across small Earth-observing satellites identified the spacecraft size at which reaction wheel power consumption makes CMGs the more efficient choice for agile missions. That threshold sits within this bus class, and it is a decision that needs to be made early in the mission design process.
For most missions, pointing requirements that exceed the typical capability of a bus class will require either a bus class upgrade or a significantly more complex system design. The constraints imposed by power budget, volume envelope, and mass allocations define the practical boundaries on what ADCS configurations are achievable within a standard design envelope.
Why ADCS Requirements Are an Underestimated Driver in Bus Selection
The previous section establishes what the physical constraints are. What it does not address is why defining ADCS requirements is so often delayed until after bus selection. In small satellite programs, mission planning tends to follow a common sequence: define the payload, select the orbit, choose the bus, then design the subsystems. ADCS sits at the end of that chain, and that placement is where the problem starts.
The Typical Planning Sequence and Where It Breaks
The payload defines the mission, so its requirements are typically the primary design driver. The problem arises when bus selection is finalized before ADCS requirements are quantified.
Pointing accuracy and slew rate requirements are among the primary constraints on spacecraft bus selection, not outputs of spacecraft bus selection. For example, a mission that needs 0.05° pointing accuracy has already constrained its bus class before any hardware is selected, because that requirement cannot be met on a nanosatellite bus regardless of component choices. When this constraint is not determined early, the project carries an unvalidated assumption that the chosen bus can support the ADCS configuration the mission requires. That assumption often goes unchallenged until preliminary design review (PDR). By then, changing the bus class carries significant schedule and cost implications.
This sequencing problem is not a failure of individual engineering judgment. It reflects a broader tendency in early mission planning to treat ADCS as a subsystem detail rather than a bus-level constraint. The Satsearch SmallSat ADCS webinar, which drew input from six ADCS manufacturers, noted that pointing requirements submitted by customers are often incomplete. A typical submission specifies an accuracy value but omits the reference frame, axis, and error metric. Without that specificity, the requirements cannot be validated against bus-level constraints early enough to influence platform selection. Conversely, teams that under-specify ADCS requirements early may lock in a spacecraft bus that later proves insufficient.
Both cases arise from treating ADCS requirements and spacecraft bus selection as independent decisions during early mission planning, even though they must be defined together.
What Actually Gets Underestimated
What gets underestimated is how early in the mission design process ADCS requirements need to be considered alongside bus selection.
The NASA Small Spacecraft Technology State of the Art Report documents this relationship directly. ADCS performance, it notes, is strongly dependent on spacecraft size, with pointing capability varying by an order of magnitude or more between nano- and micro-class platforms. This is not a gradual variation. As the previous section details, the transition from nanosatellite to microsatellite class opens up sensor and actuator configurations that are physically unavailable at smaller scales. A star tracker, a multi-wheel pyramid cluster, and the power budget to run both continuously are not incremental upgrades. They represent a categorical shift in what the ADCS can deliver.
The consequence of underestimating this relationship is that missions arrive at detailed design with a bus class that cannot support their pointing requirements. At that stage, the options are to descope the mission, upgrade the bus at significant cost, or accept degraded performance. None of these outcomes is the result of poor engineering in the detailed design phase. They trace back to a requirements sequencing decision made much earlier, when the spacecraft bus class was selected before ADCS constraints were fully understood.
A Market Example: When Bus Class Determines Mission Value
The practical consequence of this sequencing problem is not only technical. It affects mission economics directly.
NanoAvionics documents an example in its platform selection guidance. A high-resolution imaging payload placed on a 16U CubeSat bus faces a specific constraint: the available volume limits the size of reaction wheels that can be installed, which in turn limits the satellite's slew rate. With a lower slew rate, the satellite takes longer to repoint between targets, reducing the number of imaging opportunities per orbit.
The same payload on a microsatellite bus, such as the NanoAvionics MP42H, can accommodate more capable actuators, supports a higher slew rate, and captures significantly more targets per orbit. The difference in imaging productivity between the two configurations can be substantial enough to change the commercial viability of the mission.
This example shows how the problem manifests in practice. The payload requirement, high-resolution imaging with frequent retargeting, carried an implicit ADCS requirement: a slew rate high enough to support the operational concept. That constraint narrowed the viable bus class options. When the bus was selected without that constraint being explicit, the mission ended up with an ADCS capability that limited what the payload could actually deliver.
Neither the bus selection nor the ADCS specification was the source of the problem. The two decisions were made independently, and that is where the problem originated.
What This Means for Mission Planning
Pointing accuracy and slew rate requirements are determined by the mission's operational concept. Both should be defined early enough to inform bus class selection, not after the bus has been chosen. Detailed component sizing can follow once the bus class is established.
ADCS requirements should enter the design process at the mission concept phase, alongside payload definition and orbit selection. At that stage, the numbers do not need to be precise. A mission that will require better than 0.1° pointing accuracy for commercial EO has already established that a nanosatellite bus is outside the feasible range. That single constraint, recognized early, narrows the bus selection to platforms where the required ADCS performance is achievable.
Waiting until the bus is selected to quantify ADCS requirements reverses this logic. It assumes the bus will support the required ADCS configuration. The physical constraints of power, volume, and mass that govern ADCS design space are set at the bus class level, not at the component selection level.
What the Market Data Actually Tells Us
The launch data from BryceTech and the Nanosats Database points in a consistent direction: spacecraft are getting larger, while remote sensing missions are becoming a larger share of non-broadband deployments. The implication is that more missions now operate in regimes where ADCS performance becomes a limiting factor.
The spacecraft bus selection decision sits at the center of this shift. Bus class determines the power budget, volume envelope, and mass allocation that define what an ADCS can physically deliver. Missions with demanding pointing accuracy and slew rate requirements have already constrained their bus class before a single component is selected. These constraints do not emerge from component selection. They are set at the bus class level, and they are set early.
The market data indicates that this relationship is becoming increasingly relevant. When the dominant SmallSat application was broadband communications, pointing requirements were relatively modest and the relationship between bus class and ADCS capability was less likely to be a limiting factor. As remote sensing grows to nearly half of all non-broadband SmallSat deployments, and as average spacecraft mass continues to rise, a larger proportion of missions in planning today will encounter the boundaries that bus class sets on ADCS performance. For those missions, treating ADCS requirements as a downstream detail increases the risk of arriving at detailed design with a bus class that cannot support what the mission needs.
Pointing accuracy and slew rate requirements should be quantified at the mission concept phase, alongside payload definition and orbit selection. Not at a level of detail that requires component selection, but at a level that is sufficient to establish which bus class is viable. That single step reduces the likelihood of arriving at preliminary design review with a bus class that cannot support the ADCS the mission actually needs.
What the market data tells us about ADCS is that the proportion of missions where attitude control capability is a deciding factor in mission success is growing. Bus class still sets the same physical limits on ADCS capability that it always has. What has changed is the share of the market where getting that match right early determines whether a mission can deliver on its objectives.
Tensor Tech develops ADCS and CMG solutions for spacecraft from 1 kg to over 1,000 kg, covering the full range of bus classes discussed in this article. Teams working through early mission planning are welcome to reach out to discuss how ADCS requirements map to bus class selection. For missions requiring high agility and rapid retargeting, further details on CMG-based solutions can be found on our product page.
To learn more or request a consultation, contact us today: Contact Us
〈Related Reading:What Is a Control Moment Gyroscope (CMG)? A Powerful Solution for Satellite Attitude Control〉
References
-
BryceTech — Smallsats by the Numbers 2025 (March 2025). https://brycetech.com/reports/report-documents/smallsats-2025/BryceTech_Smallsats-by-the-Numbers-2025.pdf
-
Erik Kulu — CubeSats & Nanosatellites: 2024 Statistics, Forecast and Reliability, IAC 2024. https://www.nanosats.eu/assets/CubeSats-Nanosatellites-2024_ErikKulu_IAC2024.pdf
-
Lee et al. 2021 — Assessing Reaction Wheel Sizing for CubeSat Attitude Control, JoSS Vol.10 No.2. https://jossonline.com/storage/2021/07/Final-Lee-Assessing-Reaction-Wheel-Sizing-for-CubeSat-Attitude-Control-Pub-History-2.pdf
-
Douglas et al. 2021 — Practical Limits on Nanosatellite Telescope Pointing (arXiv:2112.12835). https://arxiv.org/abs/2112.12835
-
AAC Clyde Space — RW222 (1–3U CubeSat, 3–6 mNms). https://www.aac-clyde.space/what-we-do/space-products-components/adcs/rw222
-
AAC Clyde Space — RW400 (6–12U CubeSat, 15–50 mNms). https://www.aac-clyde.space/what-we-do/space-products-components/adcs/rw400
-
Satsearch — Reaction Wheels Global Market (Space Inventor WHL-500, 50–100 kg, 500 mNms). https://blog.satsearch.co/2019-07-25-reaction-wheels-an-overview-of- attitude-control-systems-available-on-the-global-marketplace-for-space
-
Rocket Lab — Reaction Wheels (RW-1.0: 1 Nms, suitable for 100 kg EO missions). https://rocketlabcorp.com/space-systems/satellite-components/reaction-wheels/
-
Tensor Tech — TensorCMG Series for SmallSats (30–1000 kg): TensorCMG-1 (1 Nms, >3 Nm), TensorCMG-4 (4 Nms, >10 Nm), TensorCMG-10 (10 Nms, >30 Nm). https://tensortech.co/product/detail/cmg_for_over_30_kg
-
NASA Small Spacecraft Technology State of the Art Report 2025 — GNC Chapter. https://ntrs.nasa.gov/citations/20250000142
-
High-precision integrated attitude determination for optical microsatellites (ScienceDirect). https://www.sciencedirect.com/science/article/abs/pii/S096706612500396X
-
Votel & Sinclair 2012 — Comparison of CMGs and Reaction Wheels for Small Earth-Observing Satellites. https://digitalcommons.usu.edu/smallsat/2012/all2012/74/
-
Satsearch Webinar — How to Choose the Right Smallsat ADCS (2021). https://blog.satsearch.co/2021-10-22-smallsat-adcs-webinar
-
NanoAvionics — Selecting the Optimal Satellite Platform Size for Small Satellite and CubeSat Missions. https://nanoavionics.com/blog/satellite-platform-selection-choosing-the-right-size-for-your-cubesat-or-small-satellite-mission/